Solutions
Robot solution
Intelligent solution
By utilizing highly accurate vision sensors and force sensors that control the amount of force applied by robots, we can automate difficult tasks that could not be automated until now.
Main intelligent technology
- 3D Vision Sensor: Realization of independent supply, high-speed picking by original technology
- Force control function: Realizes complex assembly such as advanced mating operation and phase matching.
- Multi-function electric hand: Realizes the handling of various types of workpieces of different sizes.
- Two-dimensional vision sensor: Easy calibration with a setting tool.
- Interference avoidance: Automatically prevent collision between two robots. (Compatible with iQ Platform)
- Cooperative control: Coordinated control and coordinated transportation by two robots. (Compatible with iQ Platform)
- Tracking: Work while the robot follows the work on the conveyor without stopping the conveyor.
- In addition, there are functions such as trajectory accuracy improvement function and singular point passage function.
See the FR series catalog for details on intelligent technology.
Safety solution
- Collaborative work is possible due to the high level of safety that meets the requirements of international safety standards.
- Even if a person enters or leaves the robot operating range, the production will continue without stopping the system.
- You can improve productivity by collaborating with people.

Safety solution usage scene

Safety measures by separating the human work area and robot operating area with a monitoring plane
- Robot operates at high speed when the safety fence is closed
- When the safety fence is opened, the robot continues to operate at low speed inside the surveillance plane. Workers can perform inspection work inside the safety fence and outside the monitoring plane

Workers and robots can access each other in the common work area. Collaborative work between robots and people
- Robots cannot enter the common work area when there are workers on the mat
- Robots work in a common work area when workers are not on the mat
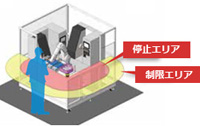
Eliminate the safety fence and use area sensor for safety measures
- When a worker enters the restricted area, the robot operation speed is restricted
- The robot stops moving when it approaches the stop area.
 Contact Us
Contact Us Call Center
Call Center