Product Features
Motion CPU Modules
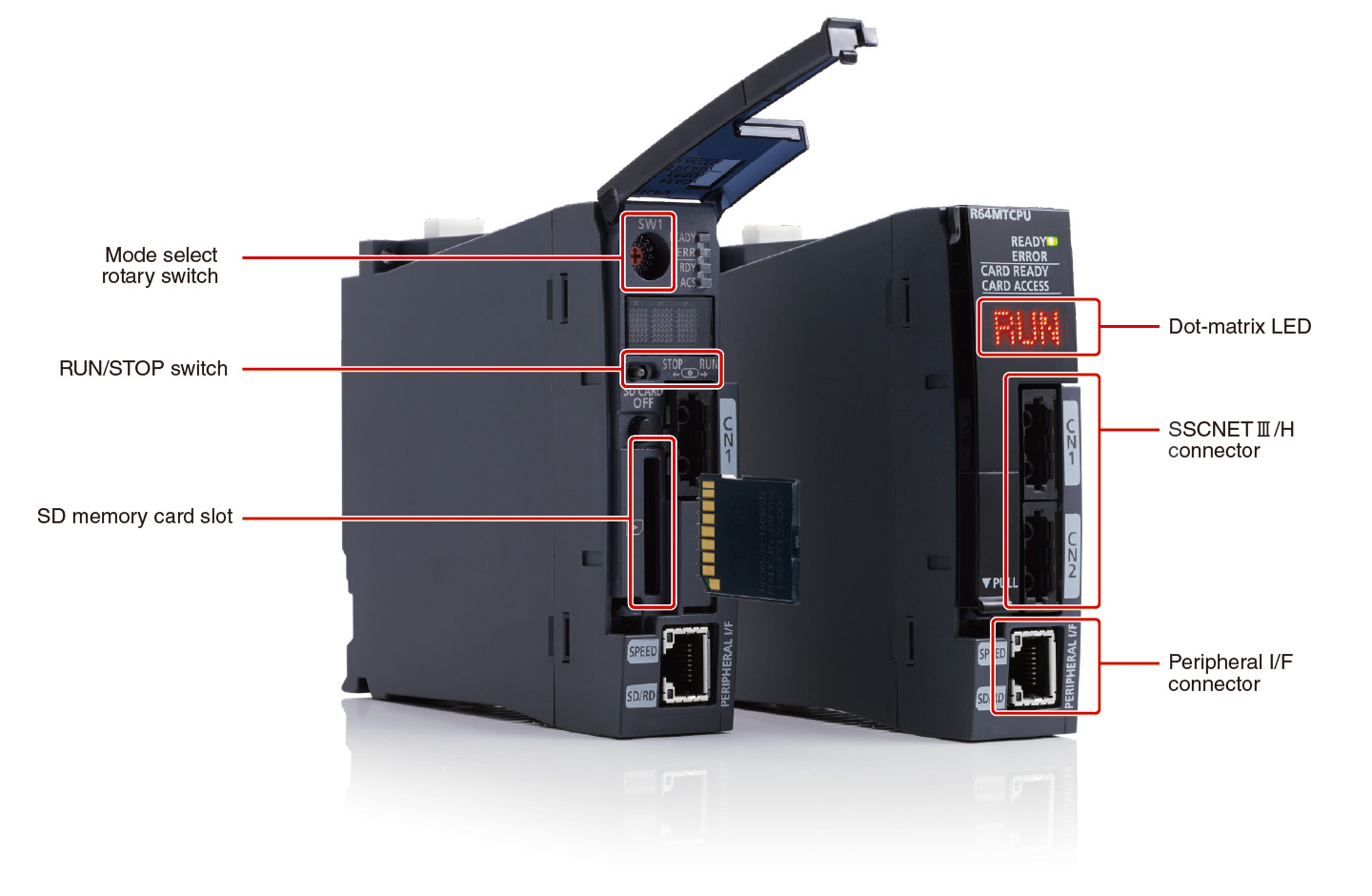
The motion CPU module is a dedicated high-precision control CPU module, designed solely for applications that require advanced motion control such as positioning control, synchronous control, and speed-torque control at a very high accuracy. The motion CPU is incorporated into the multiple CPU architecture of the MELSEC iQ-R Series complimenting the programmable controller CPU.
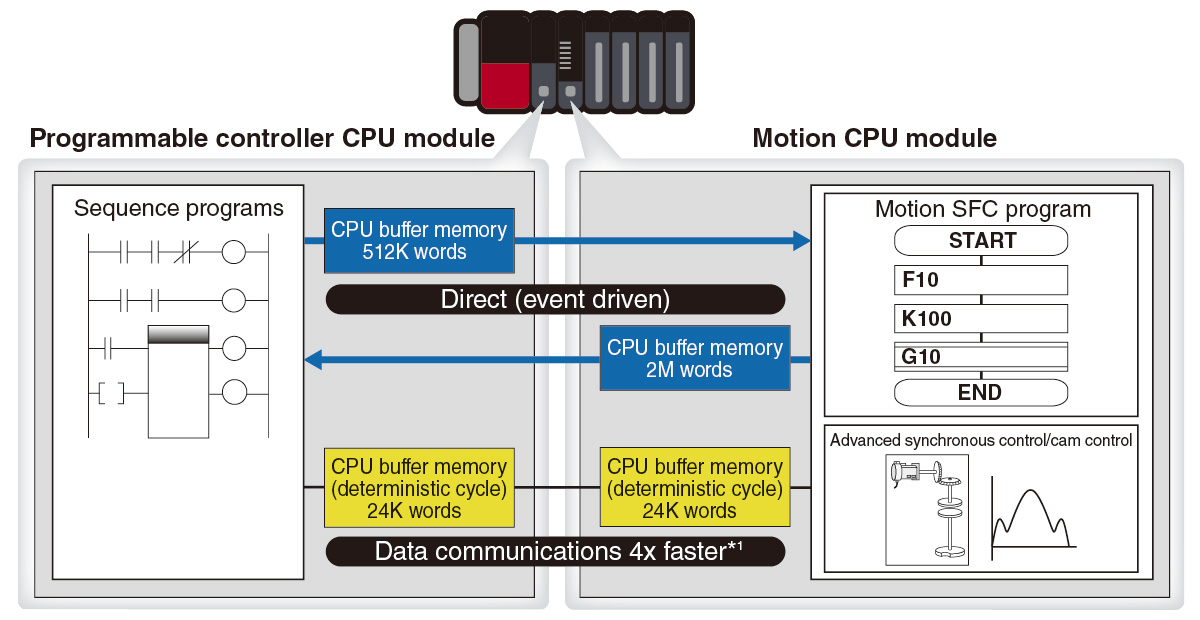
High-speed data communication between CPUs
High-speed communication is realized between the two CPUs via a large bandwidth data buffer memory exchange. There are two types of buffer memory for data exchange: one that provides cyclic exchange at a cycle time as fast as 0.222 ms; and one for direct data exchange of event-driven buffer memory, which is useful for large data bandwidth requirements. High-speed communications are very useful when there is a need to instantaneously transfer a large amount of information such as cam data, thereby simplifying programming even further.
Various different applications easily realized
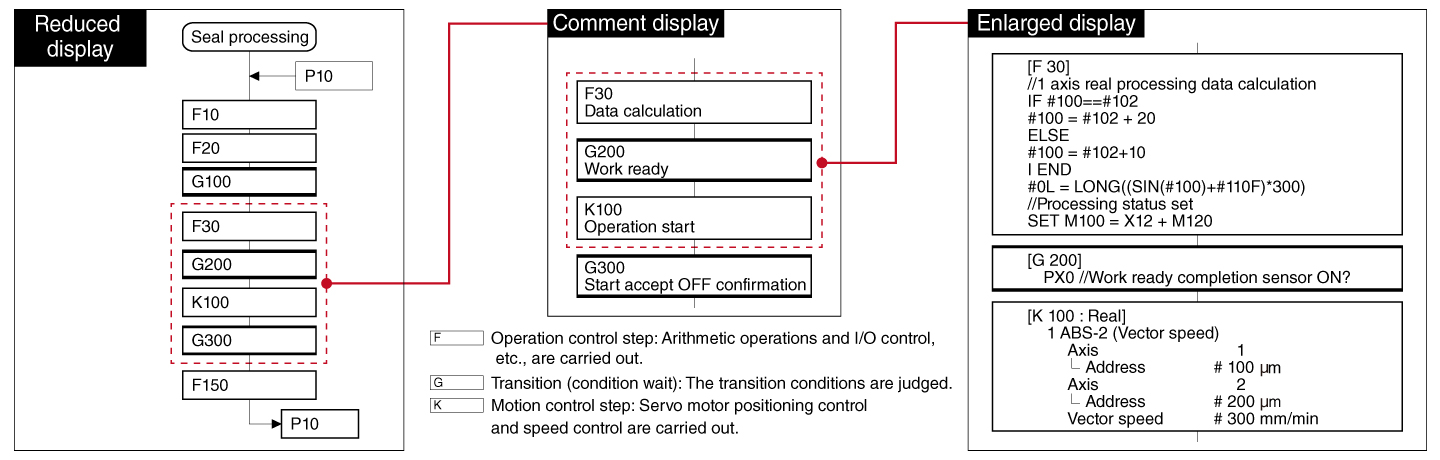
Multiple machine processes by SFC programming
The motion CPU module is programmed using the SFC (Sequential Function Chart) type language which enables programming in clearly identifiable steps. This is extremely useful where multiple machine processes have to be performed simultaneously.
■ Motion SFC Program
Motion CPU module specifications
![]() : Motion SFC
: Motion SFC ![]() : Dedicated instruction
: Dedicated instruction
| Item | R16MTCPU | R32MTCPU | R64MTCPU |
|---|---|---|---|
| Number of control axes | 16 axes | 32 axes (16 axes x 2 lines) | 64 axes (32 axes x 2 lines) |
| Operation cycle (ms) | 0.222, 0.444, 0.888, 1.777, 3.555, 7.111 | 0.222, 0.444, 0.888, 1.777, 3.555, 7.111 | 0.222, 0.444, 0.888, 1.777, 3.555, 7.111 |
| Programming language | |||
| Servo program capacity (step) | 64K | 64K | 64K |
| Number of positioning points (point) | 6400 (positioning data can be designated indirectly) | 6400 (positioning data can be designated indirectly) | 6400 (positioning data can be designated indirectly) |
| Servo amplifier network | SSCNET Ⅲ/H (1 line) | SSCNET Ⅲ/H (2 lines) | SSCNET Ⅲ/H (2 lines) |
| Max. distance between stations (m) | 100 | 100 | 100 |
| Interpolation | |||
| Linear interpolation (axis) | 2, 3, 4 | 2, 3, 4 | 2, 3, 4 |
| Circular interpolation (axis) | 2 | 2 | 2 |
| Helical interpolation (axis) | 3 | 3 | 3 |
| Control mode | |||
| PTP (Point To Point) control | ● | ● | ● |
| Continuous path control | ● | ● | ● |
| Position follow-up control | ● | ● | ● |
| Advanced synchronous control | ● | ● | ● |
| Speed-torque control | ● | ● | ● |
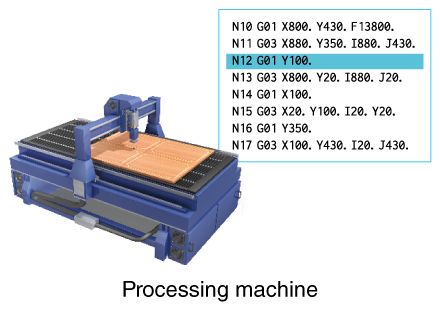
| G code control*2 | ● | ● | ● |
| Acceleration/deceleration control | |||
| Trapezoidal acceleration/deceleration | ● | ● | ● |
| S-curve acceleration/deceleration | ● | ● | ● |
| Advanced S-curve acceleration/deceleration | ● | ● | ● |
| Interface | |||
| PERIPHERAL I/F | ● | ● | ● |
| SD memory card | ● | ● | ● |
| Function | |||
| Absolute positioning system*3 | ● | ● | ● |
| Mark detection function | ● | ● | ● |
| Digital oscilloscope function | ● | ● | ● |
| Driver communication function | ● | ● | ● |
*3: A battery needs to be installed in the servo amplifier for home position backup.