






5 โซลูชันควบคุมการเชื่อมต่อระหว่าง GOT2000 และ MELSERVO

5 โซลูชันควบคุมการเชื่อมต่อระหว่าง GOT2000 และ MELSERVO
GOT2000 มีฟังก์ชันการทำงานขั้นสูงและปรับปรุงการเชื่อมต่อกับระบบ Servo ของ Mitsubishi Electric โดยสามารถนำฟังก์ชันบางส่วนของ MR Configurator2 ซอฟต์แวร์ มาใช้งานบน GOT2000 ได้ เพื่อให้สามารถควบคุมการเคลื่อนไหวได้อย่างเต็มประสิทธิภาพ ฟังก์ชัน GOT Drive ได้รับการออกแบบมาเพื่อทำลายขีดจำกัดและตอบโจทย์การใช้งานในด้านฮาร์ดแวร์และซอฟต์แวร์ ช่วยปรับความเหมาะสมกับแอปพลิเคชันขององค์กรอุตสาหกรรม ที่สามารถทำงานได้อย่างรวดเร็วมากยิ่งขึ้น ตั้งแต่การเริ่มต้นสร้างระบบ ปรับปรุงการบำรุงรักษาและการแก้ไขปัญหาการทำงาน

การกำหนดค่าระบบโซลูชันที่ 1
■ คุณสมบัติการกำหนดค่าระบบ • คำสั่ง Interface: pulse train • โหมดควบคุม: การควบคุมตำแหน่ง • โปรแกรม: โปรแกรมลำดับ (ladder) • จำนวนแกนควบคุมสูงสุด: 1/2/4/8/32 แกน • รองรับ MELSERVO MR-J4-A(-RJ) และ MR-JE-A • รองรับ GOT2000 รุ่น GT27, GT25, GT23, GT21
* ไม่สามารถใช้โหมดที่เข้ากันได้กับ MR-J3

การกำหนดค่าระบบโซลูชันที่ 2
■ คุณสมบัติการกำหนดค่าระบบ • คำสั่ง interface: SSCNET III/H • โหมดการควบคุม: การควบคุมตำแหน่ง, การควบคุมแบบซิงโครนัส, การควบคุมความเร็ว, การควบคุมแรงบิด, การควบคุมความกระชับและแรงกด, การควบคุมลูกเบี้ยว • โปรแกรม: โปรแกรมลำดับ (ladder) • จำนวนแกนควบคุมสูงสุด: 2/4/8/16 แกน • รองรับ MELSERVO MR-J4-B(-RJ) และ MR-J4-W2-B และ MR-J4-W3-B และ MR-JE-B • รองรับ GOT2000 รุ่น GT27, GT25, GT23, GT21
* ไม่สามารถใช้โหมดที่เข้ากันได้กับ MR-J3

การกำหนดค่าระบบโซลูชันที่ 3
■ คุณสมบัติการกำหนดค่าระบบ • คำสั่ง interface: SSCNET III/H • โหมดการควบคุม: การควบคุมตำแหน่ง, การควบคุมแบบซิงโครนัส, การควบคุมความเร็ว, การควบคุมแรงบิด, การควบคุมความกระชับและแรงกด, การควบคุมลูกเบี้ยว • โปรแกรม: โปรแกรมการเคลื่อนไหว (SFC) • จำนวนแกนควบคุมสูงสุด: 16/32/64 แกน • รองรับ MELSERVO MR-J4-B(-RJ) และ MR-J4-W2-B และ MR-J4-W3-B • รองรับ GOT2000 รุ่น GT27, GT25, GT23, GT21
* ไม่สามารถใช้โหมดที่เข้ากันได้กับ MR-J3

การกำหนดค่าระบบโซลูชันที่ 4
■ คุณสมบัติการกำหนดค่าระบบ • คำสั่ง interface: CC-Link IE Field • โหมดการควบคุม: การควบคุมตำแหน่ง, การควบคุมแบบซิงโครนัส, การควบคุมความเร็ว, การควบคุมแรงบิด, การควบคุมความกระชับและแรงกด, การควบคุมลูกเบี้ยว • โปรแกรม: โปรแกรมลำดับ (ladder) • จำนวนแกนควบคุมสูงสุด: 4/8/16/32 แกน • รองรับ MELSERVO เฉพาะรุ่น MR-J4-GF(-RJ) • รองรับ GOT2000 รุ่น GT27, GT25, GT23, GT21

การกำหนดค่าระบบโซลูชันที่ 5
■ คุณสมบัติการกำหนดค่าระบบ • คำสั่ง interface: pulse train • โหมดการควบคุม: การควบคุมตำแหน่ง, การควบคุมความเร็ว, การควบคุมแรงบิด • โปรแกรม: โปรแกรมลำดับ (ladder) • จำนวนแกนควบคุมสูงสุด: 1/2/4/8 แกน • รองรับ MELSERVO เฉพาะรุ่น MR-JE-C • รองรับ GOT2000 รุ่น GT27, GT25, GT23, GT21
การตั้งค่าพารามิเตอร์
หน้าจอ GOT2000 สามารถใช้เพื่อแสดงผลการทำงานและตั้งค่าพารามิเตอร์เซอร์โวต่างๆ ได้ โดยสามารถใช้ฟังก์ชันได้หลากหลาย ได้แก่
■ Sample screen*1 ■ End user ■ OEM ■ Easy startup รุ่นที่รองรับการทำงาน : GT27, GT25, GT23, GT21, GT SoftGOT2000*2
*1 Sample screen ไม่รองรับการเชื่อมต่อกับ MR-J4-GF(-RJ), MR-JE-A, MR-JE-C
*2 GT SoftGOT2000 รองรับเฉพาะ MR-J4-B(-RJ), MR-J4W2-B, MR-J4W3-B และ MR-JE-B เท่านั้น
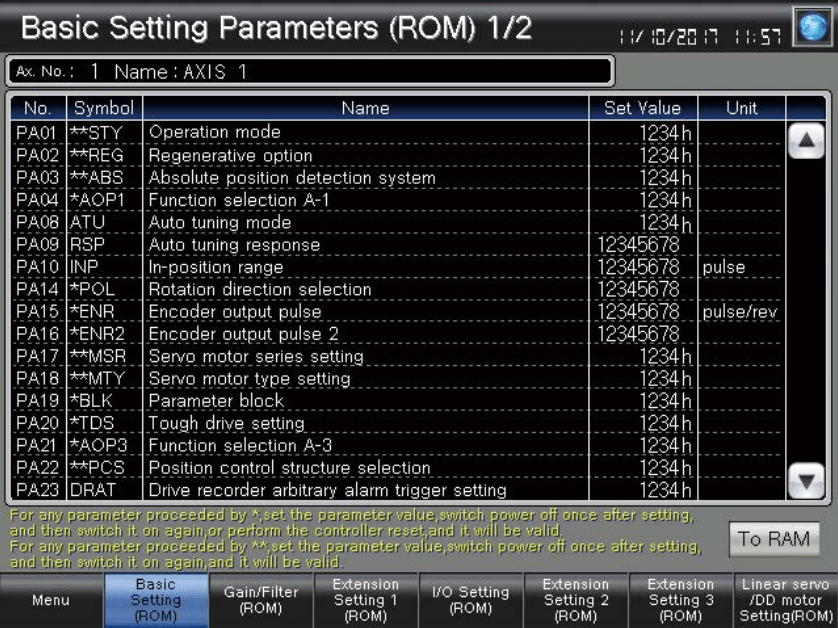
หน้าจอการตั้งค่าพารามิเตอร์พื้นฐาน
เปิดหน้าจอแสดงผลและตั้งค่าพารามิเตอร์ต่อไปนี้ใน Servo Amplifier
• ตั้งค่าพารามิเตอร์พื้นฐาน ([Pr. PA_ _ ])
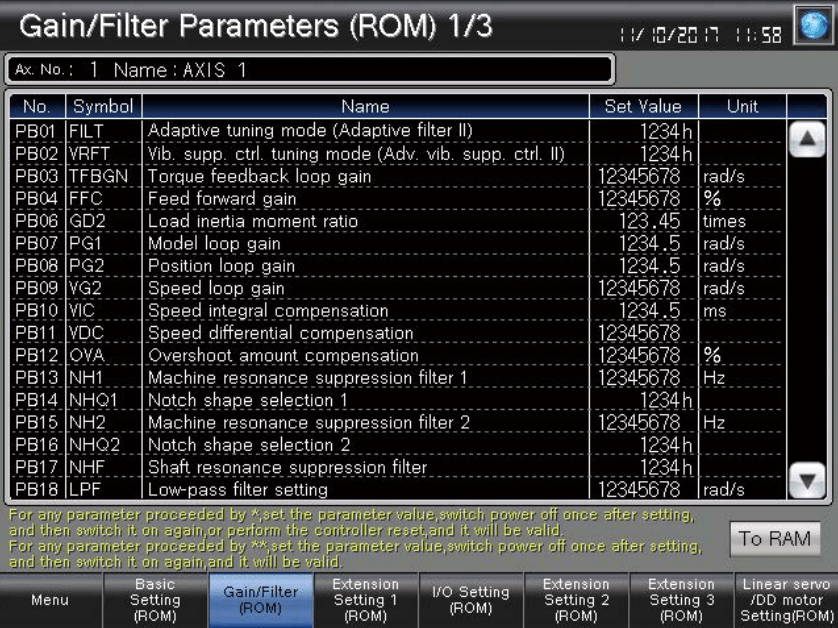
หน้าจอพารามิเตอร์ Gain/filter
เปิดหน้าจอแสดงผลและตั้งค่าพารามิเตอร์ต่อไปนี้ใน Servo Amplifier
• ตั้งค่าพารามิเตอร์ Gain/filter ([Pr. PB_ _ ])
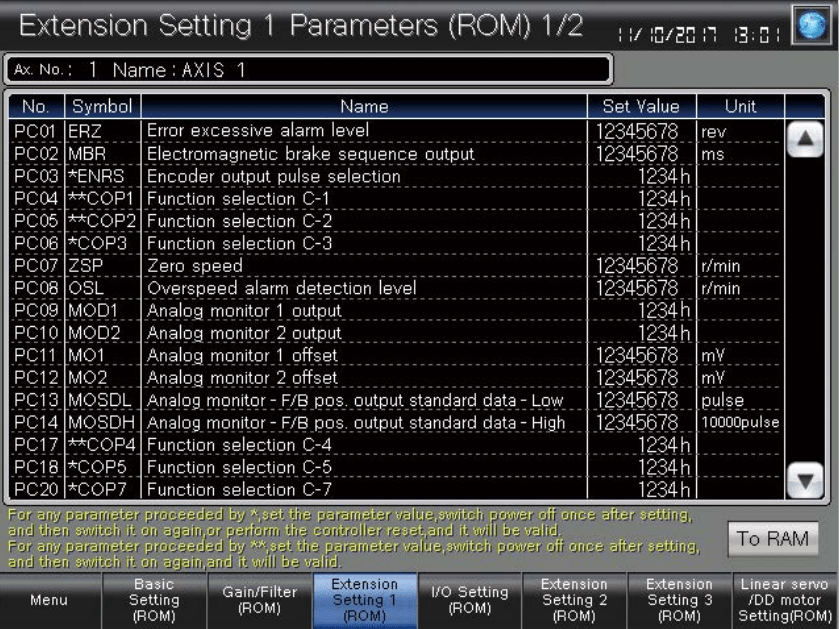
หน้าจอการตั้งค่าพารามิเตอร์ส่วนขยาย
เปิดหน้าจอแสดงผลและตั้งค่าพารามิเตอร์ต่อไปนี้ใน Servo Amplifier
• การตั้งค่าพารามิเตอร์ส่วนขยาย 1 ([Pr. PC_ _ ])
• การตั้งค่าพารามิเตอร์ส่วนขยาย 2 ([Pr. PE_ _ ])
• การตั้งค่าพารามิเตอร์ส่วนขยาย 3 ([Pr. PF_ _ ])
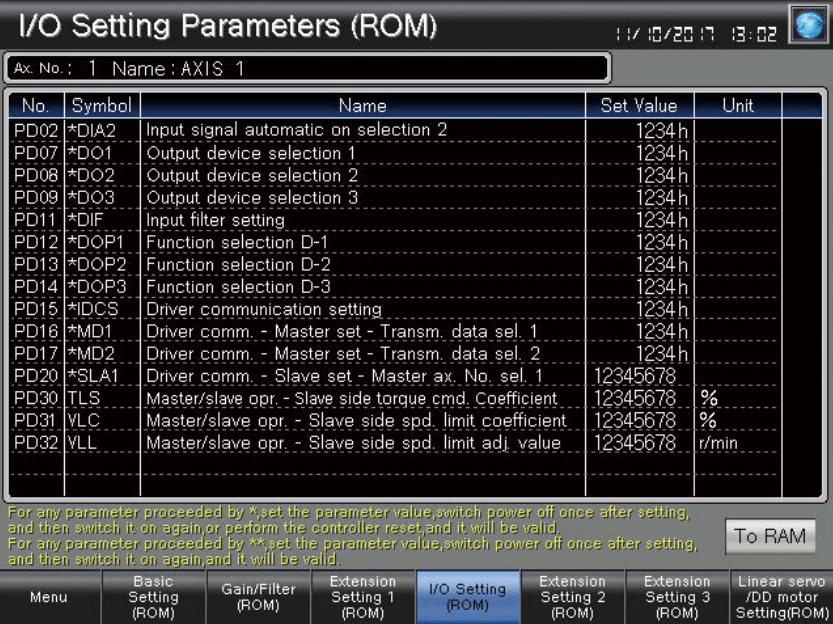
หน้าจอการตั้งค่าพารามิเตอร์ I/O
เปิดหน้าจอแสดงผลและตั้งค่าพารามิเตอร์ต่อไปนี้ใน Servo Amplifier
• การตั้งค่าพารามิเตอร์ I/O ([Pr. PD_ _ ])
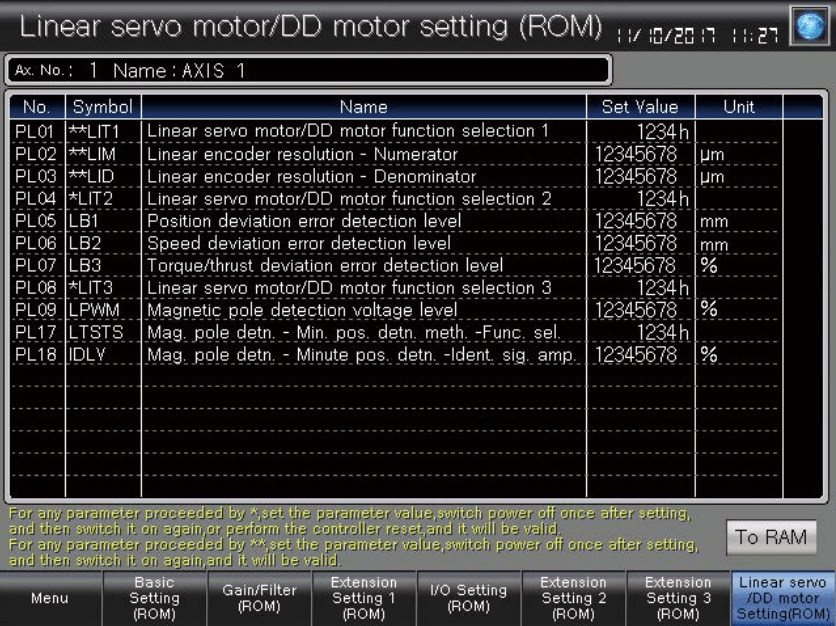
หน้าจอการตั้งค่า Servo เชิงเส้น/มอเตอร์ DD
เปิดหน้าจอแสดงผลและตั้งค่าพารามิเตอร์ต่อไปนี้ใน Servo Amplifier
• การตั้งค่าพารามิเตอร์ลิเนียร์ Servo เชิงเส้น/มอเตอร์ DD ([Pr. PL_ _ ])
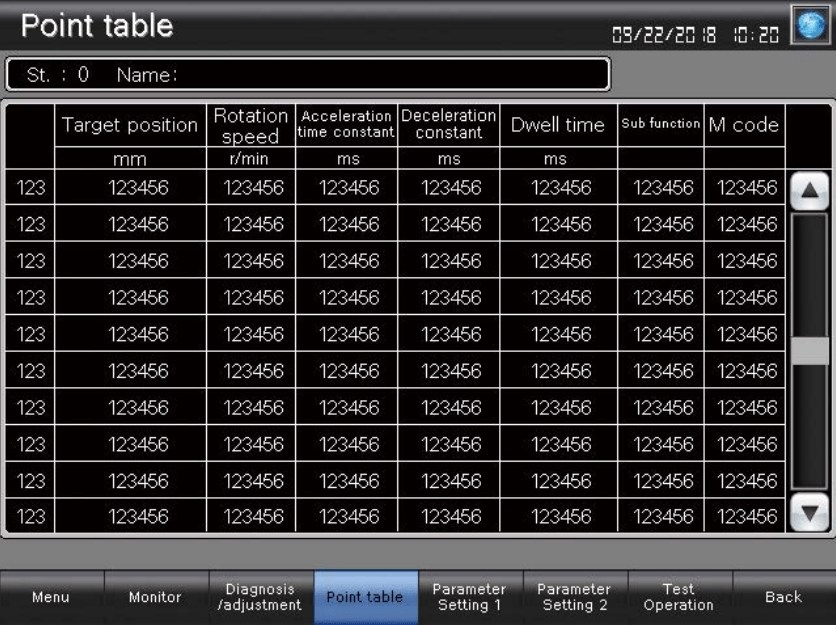
หน้าจอตาราง (เฉพาะรุ่น MR-J4-A-RJ เท่านั้น)
เปิดหน้าจอแสดงผลและตั้งค่าพารามิเตอร์ต่อไปนี้ใน Servo Amplifier
• การตั้งค่าพารามิเตอร์ I/O ([Pr. PD_ _ ])



